昨天介紹完DenseNet之後,我們今天就一如既往地通過實戰的方式來討論具體的模型架構吧!
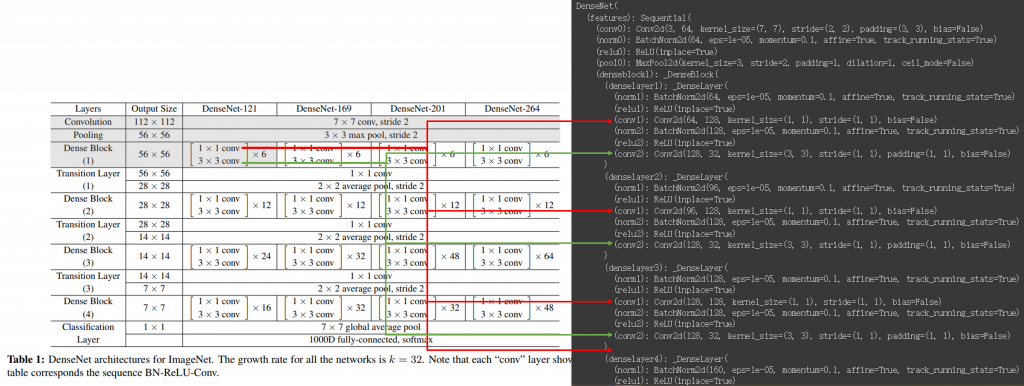
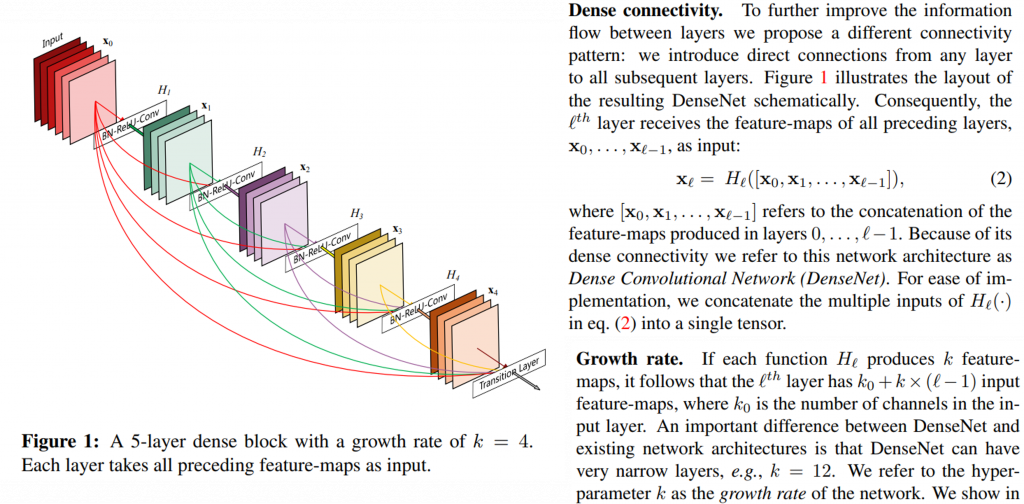
DenseNet的整體架構可以用下圖來表示:
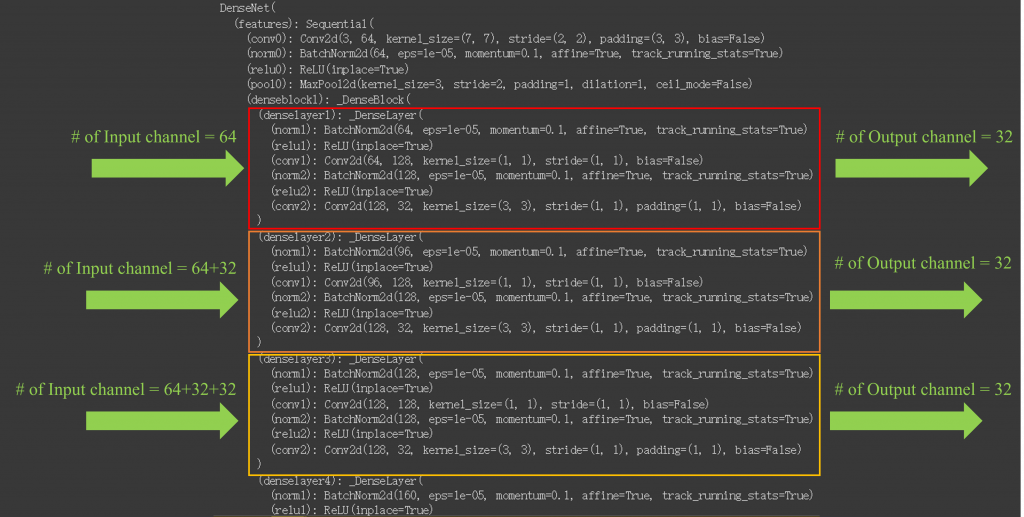
裡面會有許多的Dense Block,每個Dense Block中會有特定數量的捲積層,而Dense Block中間會需要使用Transition Layer調整特徵圖的大小。
和之前介紹過的模型類似,如果要建構DenseNet的話,可以選擇使用預訓練模型或是自己從頭建構,下面讓我們以DenseNet121為例依序介紹這兩種方法。
import torch
import torchvision.models as models
# Load pretrained DenseNet model
pretrained_densenet = models.densenet121(pretrained=True)
# Print the architecture of the pretrained model
print(pretrained_densenet)
import torch
import torch.nn as nn
# Define the DenseNet block with batch normalization and ReLU
class DenseBlock(nn.Module):
def __init__(self, in_channels, growth_rate):
super(DenseBlock, self).__init__()
self.bn1 = nn.BatchNorm2d(in_channels)
self.relu = nn.ReLU(inplace=True)
self.conv1 = nn.Conv2d(in_channels, 4 * growth_rate, kernel_size=1, bias=False)
self.bn2 = nn.BatchNorm2d(4 * growth_rate)
self.conv2 = nn.Conv2d(4 * growth_rate, growth_rate, kernel_size=3, padding=1, bias=False)
def forward(self, x):
out = self.bn1(x)
out = self.relu(out)
out = self.conv1(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv2(out)
return torch.cat((x, out), 1)
# Define the transition layer with batch normalization and average pooling
class TransitionLayer(nn.Module):
def __init__(self, in_channels, out_channels):
super(TransitionLayer, self).__init__()
self.bn = nn.BatchNorm2d(in_channels)
self.relu = nn.ReLU(inplace=True)
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1, bias=False)
self.avgpool = nn.AvgPool2d(kernel_size=2, stride=2)
def forward(self, x):
out = self.bn(x)
out = self.relu(out)
out = self.conv(out)
out = self.avgpool(out)
return out
# Define the DenseNet model
class DenseNet(nn.Module):
def __init__(self, num_classes=1000, growth_rate=32, num_blocks=[6, 12, 24, 16], theta=0.5):
super(DenseNet, self).__init__()
self.growth_rate = growth_rate
# Initial convolution layer
self.conv1 = nn.Conv2d(3, 2 * growth_rate, kernel_size=7, stride=2, padding=3, bias=False)
self.pool1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
# Blocks
in_channels = 2 * growth_rate
for i, num_layers in enumerate(num_blocks):
block = self._make_dense_block(in_channels, num_layers)
setattr(self, f'denseblock{i + 1}', block)
in_channels += num_layers * growth_rate
if i < len(num_blocks) - 1:
transition = self._make_transition_layer(in_channels, int(in_channels * theta))
setattr(self, f'transition{i + 1}', transition)
in_channels = int(in_channels * theta)
# Final layers
self.bn_final = nn.BatchNorm2d(in_channels)
self.relu_final = nn.ReLU(inplace=True)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(in_channels, num_classes)
def _make_dense_block(self, in_channels, num_layers):
layers = []
for i in range(num_layers):
layers.append(DenseBlock(in_channels + i * self.growth_rate, self.growth_rate))
return nn.Sequential(*layers)
def _make_transition_layer(self, in_channels, out_channels):
return TransitionLayer(in_channels, out_channels)
def forward(self, x):
x = self.conv1(x)
x = self.pool1(x)
for i in range(4):
x = getattr(self, f'denseblock{i + 1}')(x)
if i < 3:
x = getattr(self, f'transition{i + 1}')(x)
x = self.bn_final(x)
x = self.relu_final(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# Create a DenseNet model
model = DenseNet(num_classes=1000)
# Print the architecture of the model
print(model)
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# Hyperparameters
batch_size = 64
learning_rate = 0.001
num_epochs = 10
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# Data preprocessing and loading
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
train_dataset = torchvision.datasets.CIFAR10(root='./data', train=True, transform=transform, download=True)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)
test_dataset = torchvision.datasets.CIFAR10(root='./data', train=False, transform=transform)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=False)
# Initialize the DenseNet model
model = DenseNet(num_classes=10).to(device)
# Loss and optimizer
criterion = nn.CrossEntropyLoss() # Cross-entropy loss for classification
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
# Training loop
total_step = len(train_loader)
for epoch in range(num_epochs):
model.train()
for i, (images, labels) in enumerate(train_loader):
outputs = model(images.to(device))
loss = criterion(outputs, labels.to(device))
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i + 1) % 100 == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Step [{i+1}/{total_step}], Loss: {loss.item():.4f}')
# Evaluation
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
outputs = model(images.to(device))
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels.to(device)).sum().item()
print(f'Test Accuracy: {100 * correct / total}%')
import torch
import torchvision.models as models
import torch.nn as nn
# Load pretrained DenseNet model
pretrained_densenet = models.densenet121(pretrained=True) # 有使用預訓練權重
# pretrained_densenet = models.densenet121() # 僅使用預訓練模型架構
pretrained_densenet.classifier = nn.Linear(in_features=1024, out_features=10, bias=True)
# Print the architecture of the pretrained model
print(pretrained_densenet)


 iThome鐵人賽
iThome鐵人賽